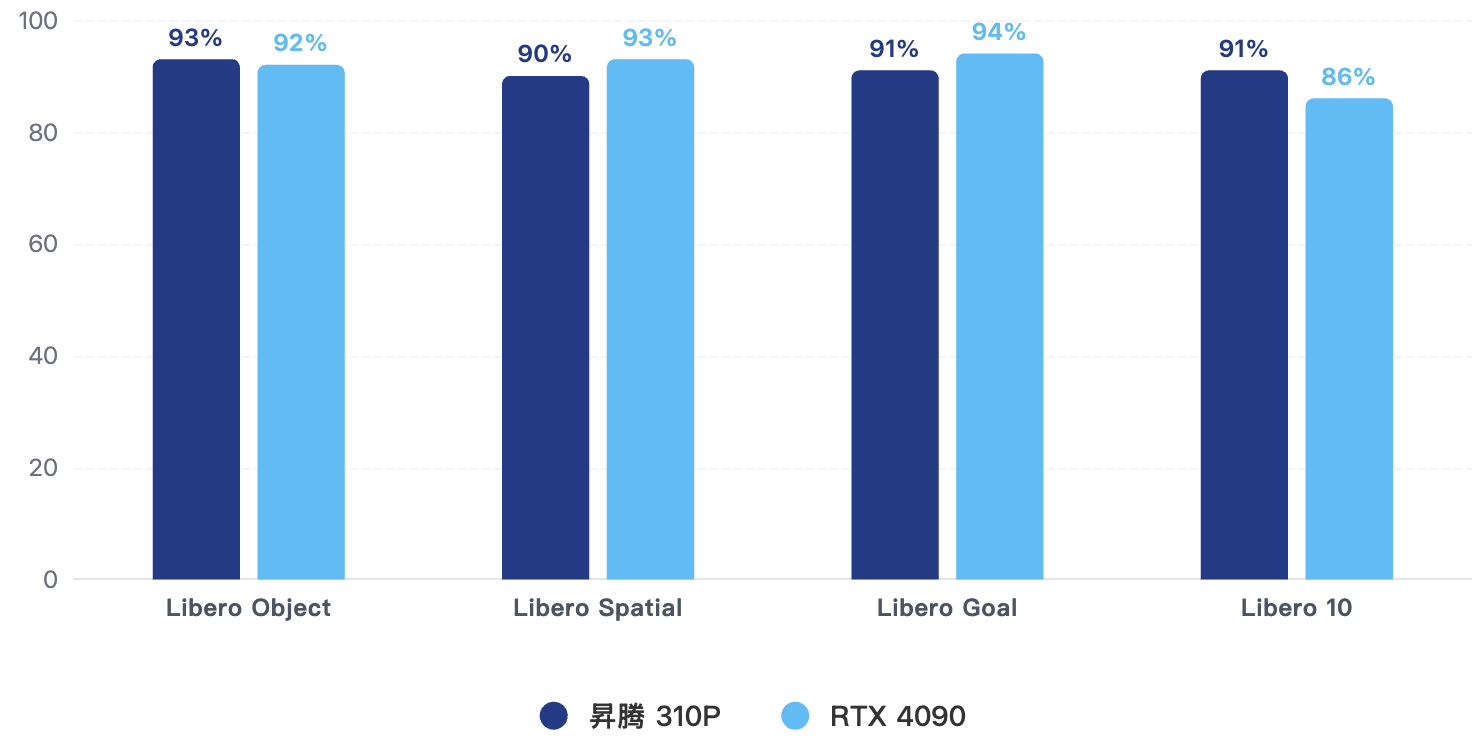
相同模型、相同任务在不同硬件平台上的推理性能表现
技术架构
从算法到实机的完整技术栈

技术架构概览
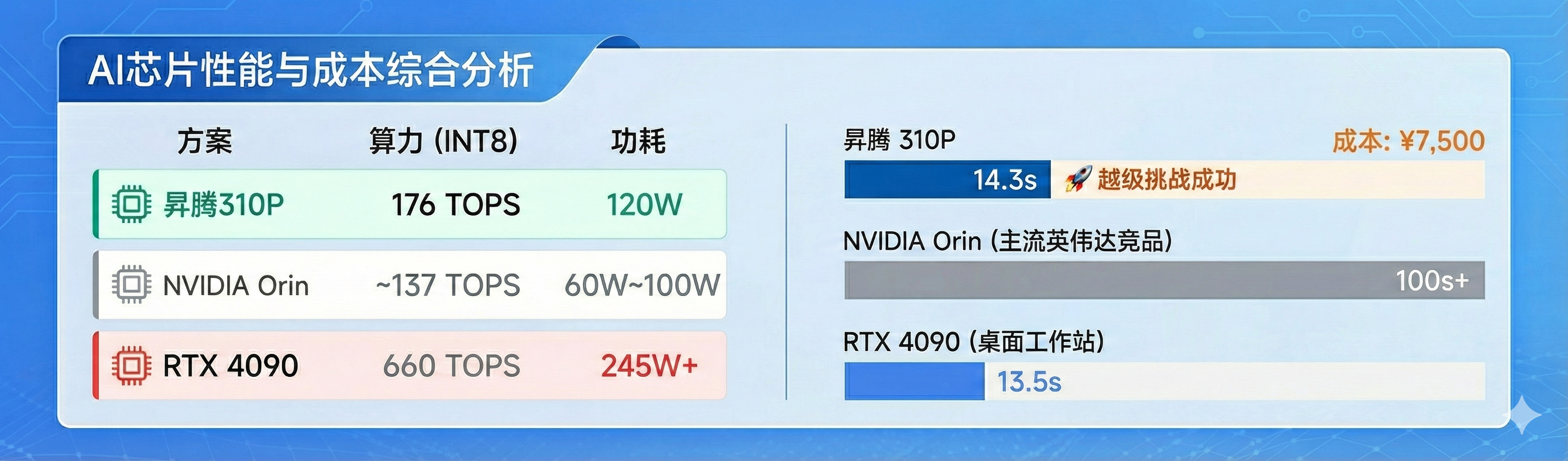
本系统构建了一套完整的具身智能解决方案,跨多个底层硬件,可承载多类机械臂和本体,向上支持多例具身智能模型。 基于昇腾 310P 边缘计算芯片,通过 CANN 深度学习框架和 ATC 模型转换工具链, 实现了多种视觉-语言-动作(VLA)模型的高效部署。
系统支持从 PyTorch 动态图到昇腾静态图的自动转换,解决了 Autoregressive 和 Diffusion 模型在昇腾端侧平台上的部署难题。 通过算子重排、内存优化和混合精度等技术,在保证精度的同时实现了毫秒级推理延迟, 为机器人实时控制提供了可靠的国产算力底座。
完整工具链支持
动静态图转换
算子级优化
边缘端部署